Searching for an optimal control in the presence of saddles on the quantum-mechanical observable landscape
Author(s): Riviello, Gregory; Wu, Rebing; Sun, Qiuyang; Rabitz, Herschel A.
DownloadTo refer to this page use:
http://arks.princeton.edu/ark:/88435/pr1mb81Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.author | Riviello, Gregory | - |
| dc.contributor.author | Wu, Rebing | - |
| dc.contributor.author | Sun, Qiuyang | - |
| dc.contributor.author | Rabitz, Herschel A. | - |
| dc.date.accessioned | 2020-10-27T18:31:52Z | - |
| dc.date.available | 2020-10-27T18:31:52Z | - |
| dc.date.issued | 2017-06 | en_US |
| dc.identifier.citation | Riviello, G., Wu, R., Sun, Q., Rabitz, H. (2017). Searching for an optimal control in the presence of saddles on the quantum-mechanical observable landscape. Physical Review A, 95 (6), 10.1103/PhysRevA.95.063418. | en_US |
| dc.identifier.issn | 2469-9926 | - |
| dc.identifier.uri | http://arks.princeton.edu/ark:/88435/pr1mb81 | - |
| dc.description | Physical Review A. Volume 95, Issue 6, 22 June 2017, Article number 063418. | en_US |
| dc.description.abstract | © 2017 American Physical Society. The broad success of theoretical and experimental quantum optimal control is intimately connected to the topology of the underlying control landscape. For several common quantum control goals, including the maximization of an observable expectation value, the landscape has been shown to lack local optima if three assumptions are satisfied: (i) the quantum system is controllable, (ii) the Jacobian of the map from the control field to the evolution operator is full rank, and (iii) the control field is not constrained. In the case of the observable objective, this favorable analysis shows that the associated landscape also contains saddles, i.e., critical points that are not local suboptimal extrema. In this paper, we investigate whether the presence of these saddles affects the trajectories of gradient-based searches for an optimal control. We show through simulations that both the detailed topology of the control landscape and the parameters of the system Hamiltonian influence whether the searches are attracted to a saddle. For some circumstances with a special initial state and target observable, optimizations may approach a saddle very closely, reducing the efficiency of the gradient algorithm. Encounters with such attractive saddles are found to be quite rare. Neither the presence of a large number of saddles on the control landscape nor a large number of system states increases the likelihood that a search will closely approach a saddle. Even for applications that encounter a saddle, well-designed gradient searches with carefully chosen algorithmic parameters will readily locate optimal controls. | en_US |
| dc.format.extent | 95.6:063418-1 - 063418-16 | en_US |
| dc.language.iso | en_US | en_US |
| dc.relation.ispartof | Physical Review A | en_US |
| dc.rights | Final published version. This is an open access article. | en_US |
| dc.title | Searching for an optimal control in the presence of saddles on the quantum-mechanical observable landscape | en_US |
| dc.type | Journal Article | en_US |
| dc.identifier.doi | doi:10.1103/PhysRevA.95.063418 | - |
| dc.date.eissued | 2017-06-22 | en_US |
| dc.identifier.eissn | 2469-9934 | - |
| pu.type.symplectic | http://www.symplectic.co.uk/publications/atom-terms/1.0/journal-article | en_US |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| PhysRevA.95.063418.pdf | 470.51 kB | Adobe PDF | View/Download | |
| medium (89).png | 52.88 kB | image/png | 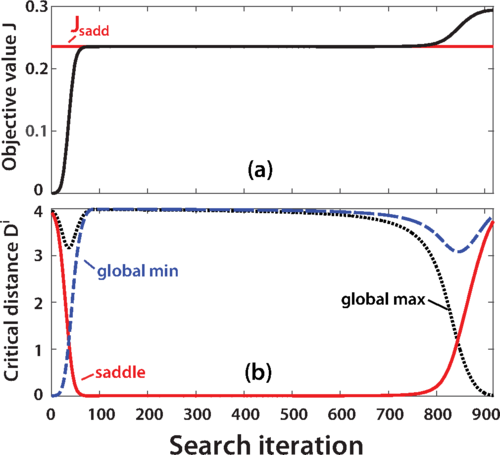 View/Download |
Items in OAR@Princeton are protected by copyright, with all rights reserved, unless otherwise indicated.